Courtesy of NASA/JPL
“This is my dream of dream missions.”
-Kevin Hand, planetary scientist and director of JPL’s Ocean Worlds Lab
Clipper won’t arrive at the Jupiter system until 2030, but scientists and researchers are already figuring out what's next in the search for alien life on the mysterious ocean world of Europa.

Courtesy of NASA/JPL
Assuming Clipper finds habitable conditions within the icy moon, humanity will need to send another mission to determine if the place is inhabited. To do that, this future endeavor will have to actually land on Europa to search for biosignatures, a task significantly complicated by the estimated 15 miles of solid ice between the moon’s surface and its ocean. However, there are engineering prototypes and proof of concepts being developed that could benefit such a mission to put (robotic) boots on the ice, and try to answer some fundamental questions about life in the universe.
To learn more, we took a short drive down the 210 Freeway, from the spaceship factories at NASA's Jet Propulsion Laboratory to the swimming pool at Caltech.
Swim for It
It’s a bright California summer day and JPL robotics engineer Ethan Schaler is standing poolside with a fishing pole. Shaler’s day job is driving the Perseverance Rover on Mars, but this morning he is working with two interns on testing the latest prototype for his Sensing With Independent Micro-Swimmers (SWIM) project.
Attached to the fishing pole is a 3D-printed, submersible drone about the size and shape of a slice of thick crust pizza. The prototype tests how well a SWIM robot could autonomously navigate and communicate while carrying a sensor payload through Europa’s ocean. Since nav and comms are still a work in progress, the fishing pole is attached so that Schaler and his interns don’t need to dive into the pool every time the drone goes rogue.

Justin R. Silverman for Supercluster
The concept envisions a fleet of these drones, each one miniaturized to palm size. They would be loaded into a “cryobot” that would carry them from the surface of Europa down through the ice and into the water. The whole SWIM project is currently funded through the NASA Innovative Advanced Concepts program.
“The question we are really answering is — 'is there utility in a bunch of simple, small robots that are just barely capable enough to do the mission you want?',” says Schaler. “I will fully acknowledge that SWIM’s design is kind of the opposite of how NASA normally builds robots. Which is part of why I think NASA picked us to study it.”

Justin R. Silverman for Supercluster
Acknowledging the enduring public relations value of a robotic selfie, Schaler says that some SWIM drones could be made larger in order to accommodate a light and camera.
Each drone would be charged with an hour or two worth of power, and they could be deployed all at once or over time in small groups as currents and water conditions change. Georgia Tech is building a miniature sensor chip that would be placed inside the SWIM robots to measure salinity, pressure, pH, conductivity, temperature and perhaps chemical sensing. In other words, the basic parameters for life as we know it.
Prime Number
Europa lacks an atmosphere to assist with slowing down a spacecraft, so landing there will be far more difficult than Mars. The icy moon is also bathed in a powerful Jovian radiation storm. Europa Clipper will dip in and out of the radiation storm with numerous flybys, rather than cooking in orbit right around Europa.
But in the search for life on this moon, landing is only the beginning. In order to get all those wonderful biosignature sensors under the ice and into the ocean, NASA will have to drill, baby, drill. Or, more likely, burn, baby, burn.
Enter: the cryobot.
This torpedo-shaped autonomous probe would arrive on Europa via a surface lander and then spend the next two to six years gliding downward. By quickly getting under a few feet of ice, electronics on the cyrobot would be shielded from the bulk of Jupiter’s radiation.
Courtesy of NASA/JPL
There are a whole lot of daunting engineering challenges to solve with these so-called melt probes – not least of which is how to consistently generate enough heat.
“Nuclear power really has been the emergent conclusion,” explains Ben Hockman, a robotics technologist at JPL. “If you put a chunk of plutonium on ice, it’s going to melt through.”
That chunk of plutonium-238 would be housed in a radioisotope thermoelectric generator (RTG), which as the name implies uses radiation to make electricity. It’s the same tech found on many NASA missions, including the Voyager probes that took the first close-up images of Europa and the later Galileo mission that showed strong evidence that the moon has an ocean with more water than Earth.
Hockman’s cryobot project at JPL is called PRIME, short for “Probe using Radioisotopes for Icy Moons Exploration.” As he explains, most spaceships powered by an RTG need to figure out a way to disperse all the waste heat generated by their plutonium. But on a cryobot, that heat is invaluable for melting ice.
Of course there are real planetary protection concerns with dropping a hot RTG into a virgin alien ocean. Plans call for corrosion proof housing that would also use the surrounding seawater as a cooling system. Engineers are also considering swapping out the RTG for a fission reactor that could be shut down when it reaches the ocean.
Once the cryobot is in the water, either free floating or else anchored to the ice, Hockman envisions it functioning for upwards of a year, perhaps deploying SWIM drones, taking photos and ingesting water samples to study with a suite of onboard sensors. Not unlike what the Mars rovers do on the Red Planet, just a lot more wet.
“No mission before has handled water,” says Hockman, “because there is just no water that we’ve been to.”
Cryobot Competition
NASA has funded research into other variations on the cryobot concept, including designs from Stone Aerospace in Texas. Some of those suggest using closed cycle hot water jets to melt through the ice, or even a laser beam fired directly out of the tip of the cryobot.
“There is an efficiency metric,” explains Stone Aerospace founder Bill Stone. “It’s kilowatts of power per cubic meter of ice melted, and you can compare these against different cryobot designs.”

Left: Justin R. Silverman for Supercluster; Right: Courtesy of NASA/JPL
To test various ice busters, Stone Aerospace uses a cryogenic vacuum chamber that holds a column of ice at the equivalent temperature that would be found on Europa, minus 320°F. Engineers there are also exploring ways to move diagonally through the ice, in the event the cryobot encounters rocky obstacles that block its downward progress.
Another complicating factor is that the sides of any cryobot would also need to be heated, otherwise ice will refreeze around it, locking the probe in place before ever reaching the ocean.
Back at JPL, the Exobiology Extant Life Surveyor (EELS) project is a 13-foot-long robotic snake that is designed to mechanically slither down an icy glacial crevasse. This would come in handy on an icy moon like Saturn’s Enceladus, where plumes of water have been observed blasting up through the ice and into space.
There is evidence for plumes on Europa as well, something Clipper aims to investigate. If giant cracks in the ice are discovered that lead all the way down to the ocean, it may be more efficient to search for biosignatures on Europa with something like an EELS robot rather than a cryobot.
Swimming Aliens
If you’re a fan of James Cameron’s lesser known work, you may have seen planetary scientist Kevin Hand go on a fantastical journey into the ocean of an ice moon, where he discovers swimming aliens and their towering underwater cities.

Justin R. Silverman for Supercluster
In real life, Hand is the director of the Ocean Worlds Lab at JPL, and the author of Alien Oceans, a guide to exploring places like Europa and Enceladus. Hand theorizes that worlds with oceans under an ice shell could be ubiquitous throughout the universe and perhaps even be the most common place for life to thrive.
“It comes back to the fundamental question of, is the origin of life easy or hard?,” Hand says. “If the origin of life is easy, if it can form around hydrothermal vents or in ice shells, then I think Europas, galactic and throughout the cosmos, are inhabited.”
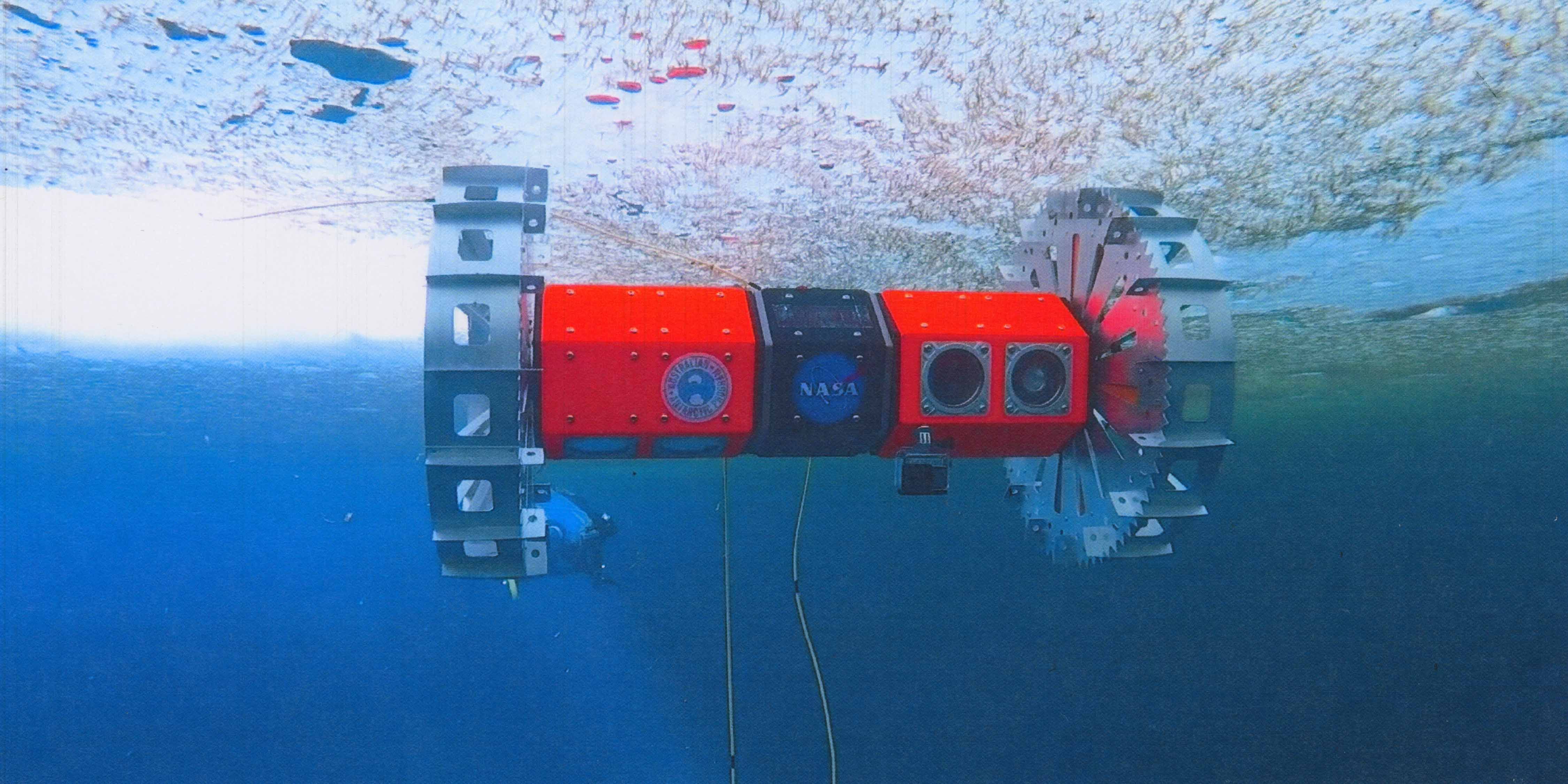
Hand and project systems engineer Andy Klesh are currently refining the Buoyant Rover for Under-Ice Exploration (BRUIE), a “ceiling rover” that travels on big wheels under the ice. BRUIE has been tested in Alaska and Antarctica and could serve as another kind of autonomous vehicle to explore Europa. One version functioned for five days under the ice running on AA batteries.
More refining would be needed to deploy something like BRUIE on a moon of Jupiter, just as there is more work to be done on all these project designs. Hand and others have suggested a Europa lander that studies the surface ice without trying to burn all the way down to the ocean would be a valuable intermediate step before landing a full cryobot. There are also big engineering challenges ahead in figuring out how to communicate from an alien ocean under miles of ice all the way back to Earth. Autonomous navigation systems have more development ahead before they can be unhooked from the fishing pole.
“All these questions are entirely answerable through robotic exploration and with robots that we can build and launch now,” says Hand. “These missions are hard, but beyond verifying the technologies, there is no magic wand that needs to be waived.”